
GRINS Intelligent Robotics and Systems

Principal investigator: Alícia Casals
Website GRINS advances medical robotics and computer vision to develop robotic systems for surgery, rehabilitation, and disability assistance. Their work focuses on robot control through human-robot interaction, user state monitoring, and environment perception to interpret the context of operation. Their goals include integrating artificial intelligence and augmented reality to assist surgical procedures; personalized control of rehabilitation using data from devices like exoskeletons and crutches; and developing robotic mobility solutions for people with disabilities or the elderly, featuring adaptive interfaces to ensure safety and efficient control.

Featured Projects
SARAS
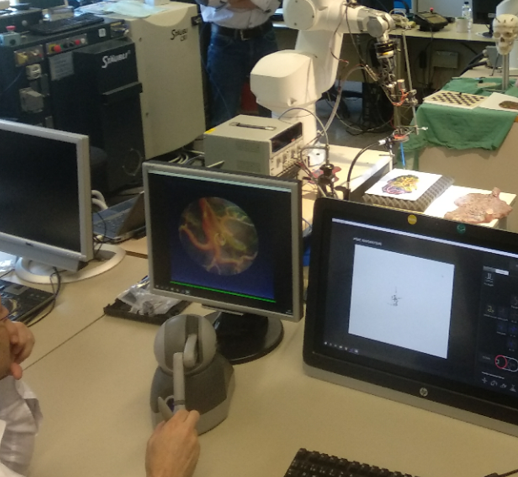
The Smart Autonomous Robotic Assistant Surgeon (SARAS), focuses on the automation of surgical assistance tasks by combining advanced procedure modeling with real-time action perception. The system enables an autonomous robotic assistant to perform auxiliary tasks with precision and reliability, aiming to reduce reliance on human support staff in the operating room while enhancing surgical efficiency and safety.

PosMOFYA
An hybrid platform combining orthosis and wheelchair functionalities to improve mobility, functionality, and user acceptance for home environments. This includes robotization of a support wheelchair not only for mobility but also for manipulation and posture correction. The system incorporates an articulated structure for postural adjustments and a robotic exoskeleton-type arm for manipulation assistance. User control interfaces are adapted to individual needs and include gaze guidance, head movement, EEG, voice commands, and more.
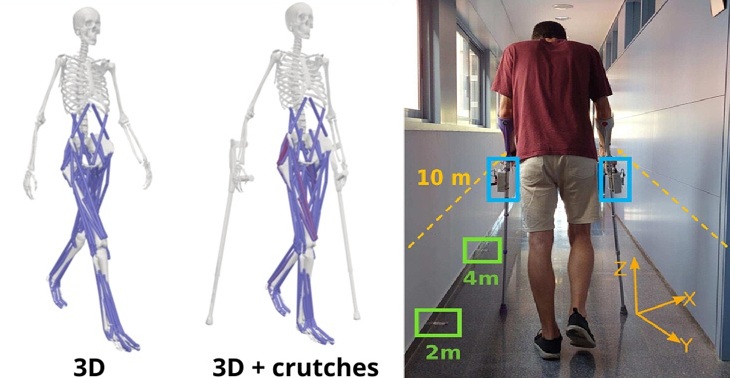
Crutch Gait Pattern Characterization
This project develops instrumented crutches to capture essential gait parameters —such as gait type, applied force, execution speed, and asymmetry— with the aim of analyzing the user’s intent. Ultimately, this information allows for personalized control of exoskeletons or other mechanical assistive devices.
SARAS
The Smart Autonomous Robotic Assistant Surgeon (SARAS), focuses on the automation of surgical assistance tasks by combining advanced procedure modeling with real-time action perception. The system enables an autonomous robotic assistant to perform auxiliary tasks with precision and reliability, aiming to reduce reliance on human support staff in the operating room while enhancing surgical efficiency and safety.
PosMOFYA
An hybrid platform combining orthosis and wheelchair functionalities to improve mobility, functionality, and user acceptance for home environments. This includes robotization of a support wheelchair not only for mobility but also for manipulation and posture correction. The system incorporates an articulated structure for postural adjustments and a robotic exoskeleton-type arm for manipulation assistance. User control interfaces are adapted to individual needs and include gaze guidance, head movement, EEG, voice commands, and more.
Crutch Gait Pattern Characterization
This project develops instrumented crutches to capture essential gait parameters —such as gait type, applied force, execution speed, and asymmetry— with the aim of analyzing the user’s intent. Ultimately, this information allows for personalized control of exoskeletons or other mechanical assistive devices.

